Lehrstuhl Strömungsmechanik
Statikgebäude Haus IV
Albert-Einstein-Straße 2
18059 Rostock
Fon +49 (0) 381 498 - 9311
Fax +49 (0) 381 498 - 9312
sekretariat.lsmuni-rostockde
Übersicht
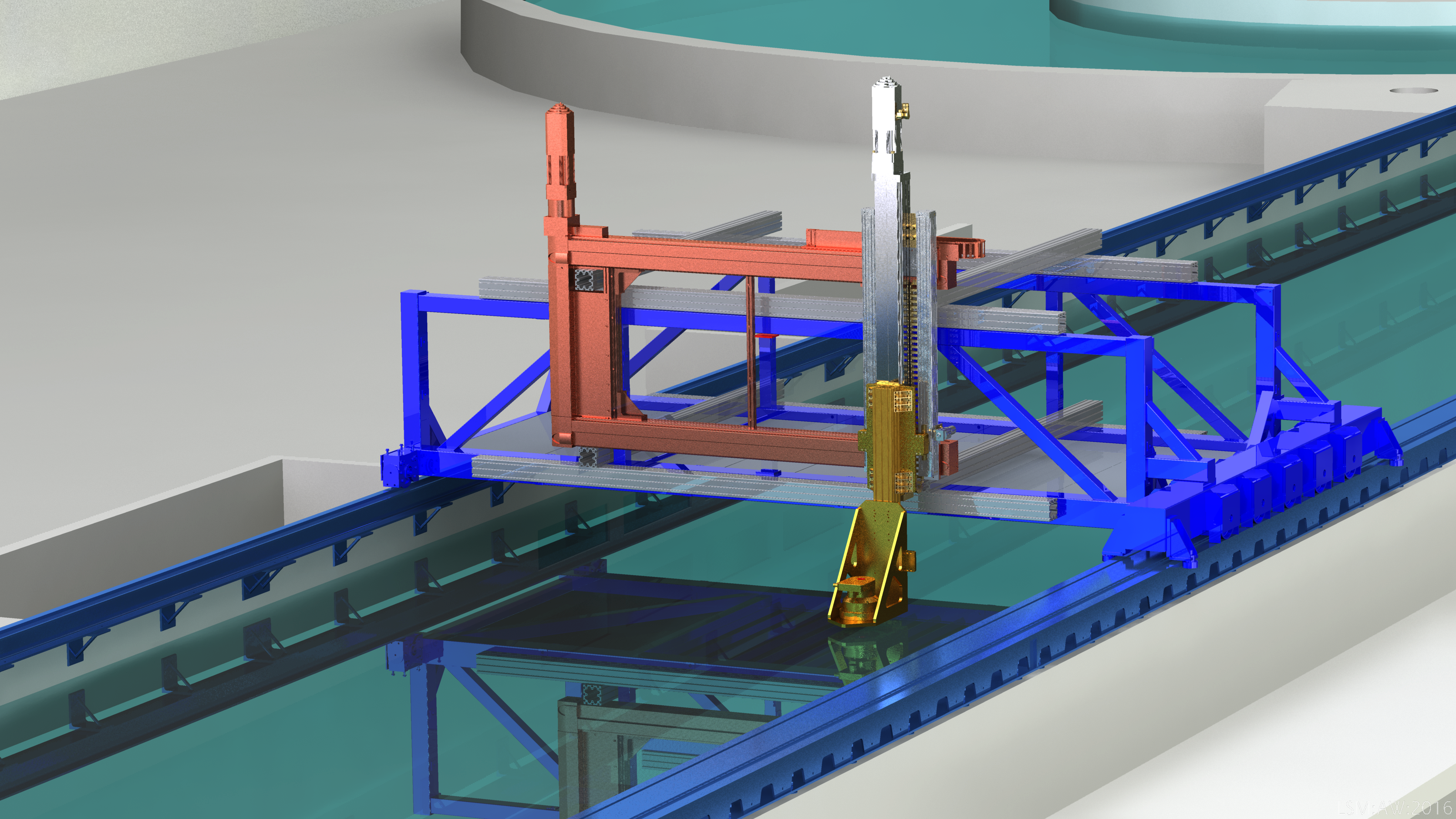
Schleppkanal mit Hochleistungsschleppsystem
► Hochleistungsschleppsystem
► Schleppkanal
► Zwischenboden
► Einsetzbare Messsysteme
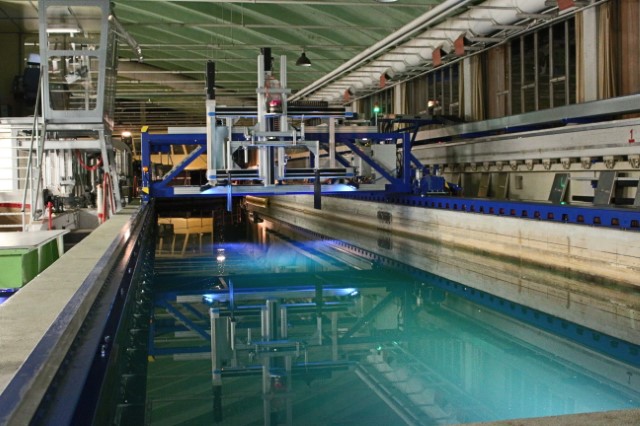
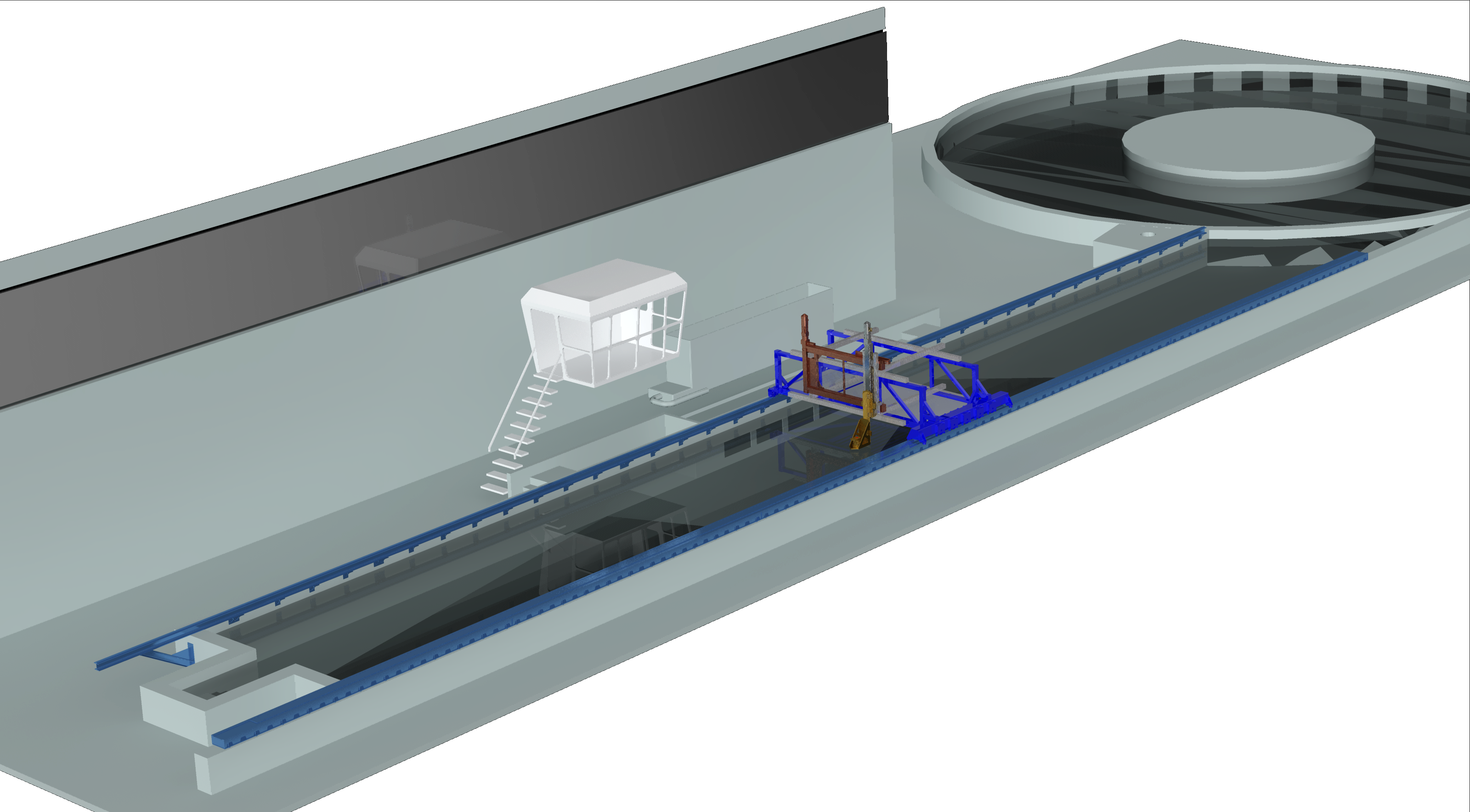
Schleppkanal mit Hochleistungsschleppsystem
in der Strömungshalle
Impressionen vom Schleppkanal
Beschreibung der Versuchsanlage
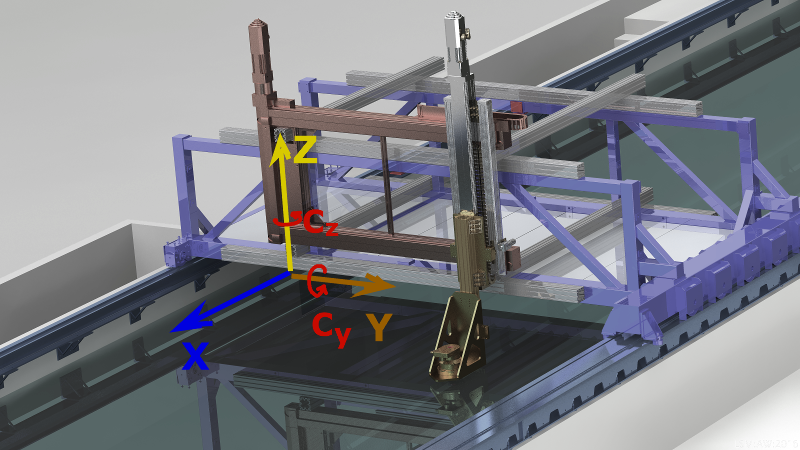
- Anlage zur mehrdimensionalen dynamischen Bahnführung von Modellen mit Geschwindigkeiten bis 9 m/s und Beschleunigungen bis 8 m/s²
- drei translatorische (X, Y, Z) und eine rotatorische (C) Achse
- CNC-Bahnsteuerung ermöglicht voll automatische Modellführung, erweiterbar auf bis zu sechs Achsen
- unbemannter ferngesteuerter oder bemannten Betrieb möglich
- variable Systemkonfiguration und optionale Messsysteme ermöglichen Anpassung auf unterschiedliche Einsatzfälle
Einsatzmöglichkeiten
- Tief- und Flachwasserversuche
- horizontale und/oder vertikale Bahnführung
- Nachführbetrieb in X-Richtung
- Beschleunigungs- und Sloshing-Versuche
Hochleistungsschleppsystem (HLSS)
Technische Daten
- X-Achse (obligatorisch)
[Fahrtrichtung des Schleppwagen]- Linearservomotor, max. Schubkraft: 10 kN
- Fahrweg: 34,7 m, Positioniergenauigkeit: 0,1 mm
- max. Geschwindigkeit bei
- Zuladung bis 800 kg: 5,0 m/s
- Zuladung bis 200 kg: 9,0 m/s
- max. Beschleunigung bei
- Zuladung bis 800 kg: 5,0 m/s²
- Zuladung bis 200 kg: 8,0 m/s²
- Y-Achse (optional)
[quer zur Fahrtrichtung des Schleppwagen]- Servomotor, max. Drehmoment: 66 Nm
- Fahrweg: 2,0 m, Positioniergenauigkeit: 0,1 mm
- max. Geschwindigkeit: 1,5 m/s
- max. Beschleunigung: 15 m/s²
- max. Tragfähigkeit: 450 kg
- Z-Achse (optional)
[vertikal zur Fahrtrichtung des Schleppwagen]- Servomotor, max. Drehmoment: 52 Nm
- Fahrweg: 1,1 m, Positioniergenauigkeit: 0,1 mm
- max. Geschwindigkeit: 1 m/s
- max. Beschleunigung: 20 m/s²
- max. Tragfähigkeit: 300 kg (mit Gewichtskompensation)
- C-Achse (optional)
[Drehachse frei orientierbar]- Servomotor, max. Drehmoment: 1840 Nm
- Fahrweg: +/-360°, Positioniergenauigkeit: 0,1°
- max. Drehgeschwindigkeit: 90°/s
- max. Drehbeschleunigung: 3000°/s²
- max. Tragfähigkeit: 250 kg
- Orientierung z.B. als
- Gier- bzw. Schlingerwinkel (um Z-Achse)
- Nick- bzw- Stampfwinkel (um Y-Achse)
- Roll- bzw. Wankwinkel (um X-Achse)
Schleppkanal
Technische Daten
- Versuchsbecken
- Länge: 37 m
- Breite: 5 m
- max. Wassertiefe: 3 m
- vorgelagertes Trimmbecken
- Länge: 2,4 m
- Breite: 1,3 m
- seitlicher Beobachtungstunnel
- vier Beobachtungsfenster unterhalb der Wasserobefläche
Zwischenboden
Technische Daten
- frei im Becken positionierbar
- Höheneinstellbereich
- +10 mm bis -2000 mm (bezogen auf den Normalwasserspiegel im Vesuchsbecken)
- stufenlos
- Gesamtlänge
- 10,5 m
- sieben Segmente
- Panelsegment
- Länge 1,5 m
- Breite 4,0 m
- Einsatzmöglichkeiten, beispielsweise:
- Flachwassermanöverversuche
- Bodeneffektuntersuchungen
Einsetzbare Messsysteme
(optional)
- Unterwasser PIV (Particle Image Velocimetry)
- Piezokraftmesssystem 6 Kanäle, 0,05 N ... 5000 N
- 6-Komponenten-Kraftwaage R 38
- Druckmesstechnik
- Beschleunigungsmesstechnik