
Kontakt
Dipl.-Ing. Tobias Bestier
Statikgebäude (Haus IV) / Raum 109
Albert-Einstein-Straße 2
18059 Rostock
Fon +49 (0) 381 498 - 9313
Fax +49 (0) 381 498 - 9312
tobias.bestieruni-rostockde
Schiffbauliche Anwendungen von Methoden zur Strömungskontrolle (SAMSON)
Teilvorhaben: Design und Experimentelle Untersuchung von Strömungskontrolle im Schiffbau (DEUSS)
Das Ziel dieses Teilvorhabens besteht in der Bereitstellung der Voraussetzungen für die experimentelle Untersuchung von schiffbaulichen Modellen mit aktiver Strömungskontrolle, der prototypischen Entwicklung von Strömungskontrollsystemen in schiffbaulichen Modellen und der experimentellen Validierung derselben.
Motivation
Ökologische und ökonomische Aspekte sind Triebkräfte der Erforschung und Entwicklung von Methoden zur Steigerung der Energieeffizienz im maritimen Güter- und Personentransport. Neben logistischen Neuerungen, treibstoffeffizienteren Hauptmaschinen und anderen Aspekten spielt die Hydrodynamik des Rumpfes und der Steuer- und Antriebsorgane eine Schlüsselrolle bei den Anstrengungen, die Transportaufgaben zur See nachhaltiger zu lösen.
Ziele
Die strömungsmechanische Zielstellung ist die Verringerung bzw. Vermeidung einer Strömungsablösung. Die Strömung entlang eines Körpers verliert durch Reibung an Impuls. Kommt ein negativer Druckgradient und/oder die Krümmung der Oberfläche des Körpers hinzu, kann die Strömung der Oberfläche nicht weiter folgen und verliert den Kontakt. Ein Rückstromgebiet entsteht, verbunden mit einer Erhöhung des Widerstands und Verringerung von Auftriebskräften. Die Kontrolle der Ablösung zielt auf eine vollständige Vermeidung der Ablösung oder eine Verzögerung der Ablösung hin zu höheren Anstellwinkeln bzw. kleineren Reynolds-zahlen ab.
Arbeitsplan
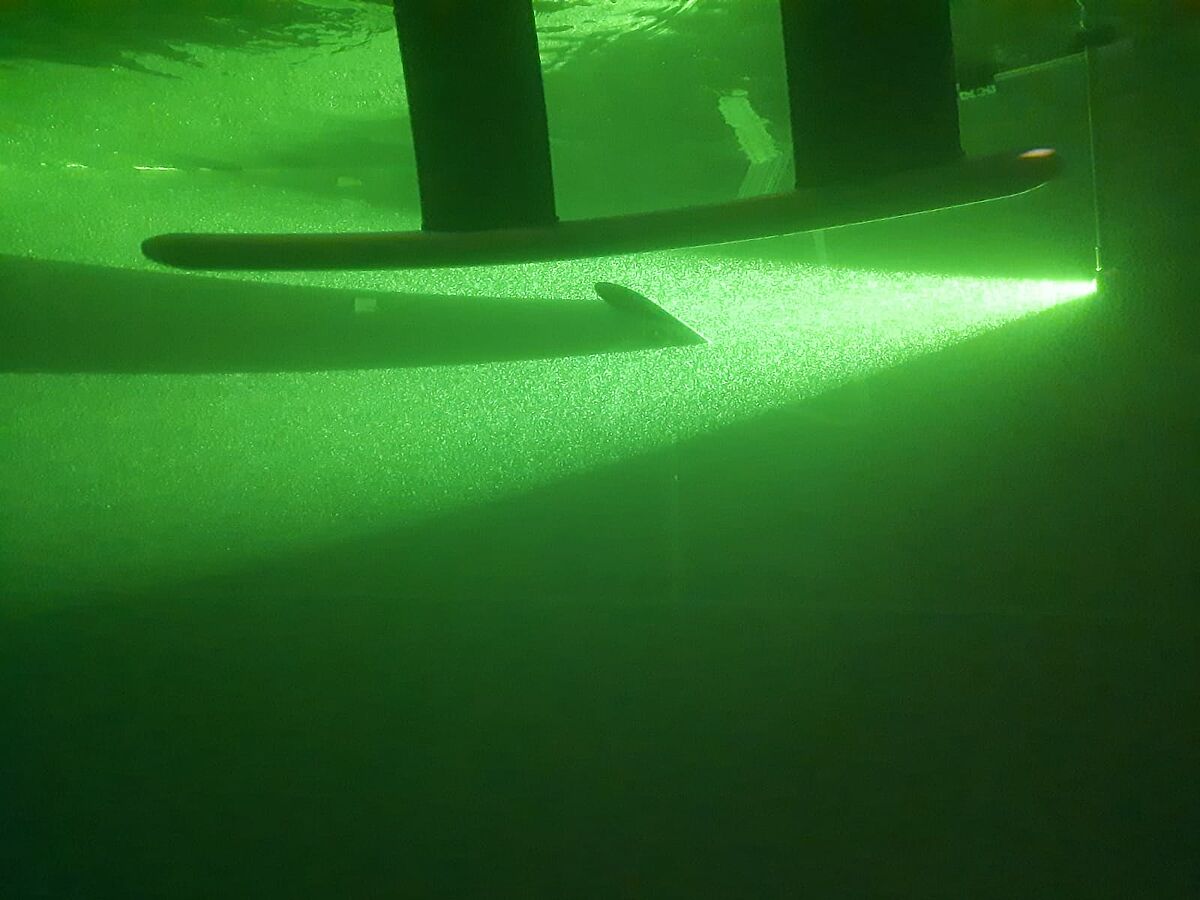
Das Ziel des Projektes ist die Demonstration von Strömungskontrolle an den vier Leitanwendungen Ruder, Rumpf, Hinterschiff und Stabilisatoren.
Die spezifischen Arbeitsschritte für jede Anwendung folgen einer gemeinsamen Methodik, die die Anforderungen bei der Entwicklung eines Strömungskontrollsystems abbildet und gleichzeitig wissenschaftliche Reproduzierbarkeit sicherstellt. Diese beinhalten die schrittweise Erhöhung der Technologiereife für jede Implementierung nach definierten Kriterien. Dabei sind drei Entwicklungsstufen vorgesehen: erstens, vereinfachte Modelluntersuchungen am Hochleistungsschleppsystem im Schleppkanal der Universität Rostock (LSM); zweitens, realistische Modellgeometrie in relevanter Umgebung im Schleppkanal; und drittens Teilentwicklung eines Full-Size Demonstrators.
Informationen zum Forschungsprojekt
| Antragsteller / Bearbeiter | Prof. Dr.-Ing. Sven Grundmann; Matthias Fromm, M. Sc.; Dipl.-Ing. Tobias Bestier; Gustavo Castaneda Fuentes, M.Sc. |
|---|---|
| Laufzeit | 01.11.2019 - 30.09.2023 |
| Finanzierung | Bundesministerium für Wirtschaft und Entwicklung (BMWi) |